ダイビングニュース
今や海洋ロボットは単独飛行する

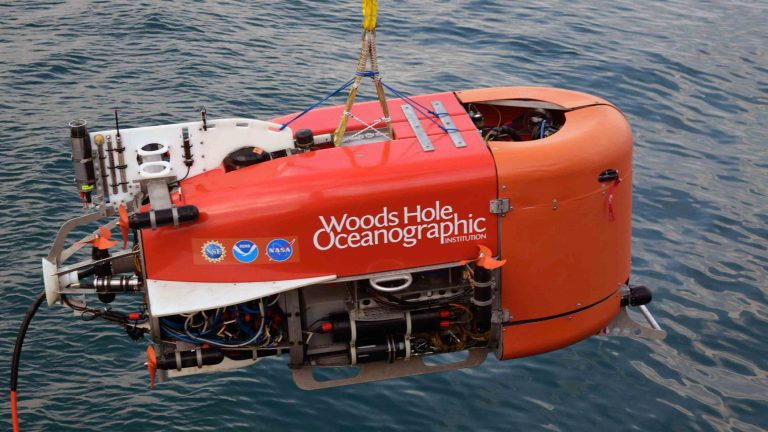
写真: エヴァン・ルボフスキー、ウッズホール海洋研究所。
ギリシャのエーゲ海のサントリーニ島沖合、深さ500メートルの活火山、コルンボで、水中ロボットが自律的に堆積物サンプルを採取したという既知の最初の事例が確認された。
国際研究チームのためにサンプルを採取したロボットアームは、マサチューセッツ州のウッズホール海洋研究所(WHOI)が開発したネレイド・アンダー・アイス(NUI)と呼ばれるハイブリッド遠隔操作船に搭載された。
WHOIの科学者リッチ・カミリ氏は、「パイロットが運転せずに車両がサンプルを採取できるようになったのは大きな進歩だ」と述べた。 「私たちの目標の 1 つは、ジョイスティックを捨てることでしたが、まさにそれを達成することができました。」
研究者らは、コロンボとその微生物生命体の「過酷で化学物質に満ちた」環境を研究すると同時に、海洋ロボットが人間の介入なしにどこまで探索できるかを調査していた。
スマートカーサイズの NUI は、Spock という名前のプランナーを含む、人工知能ベースの自動計画ソフトウェアを採用しています。
これにより、どの火山地を訪れるかを決定し、自律的にサンプルを採取し、「丸呑みサンプルホース」を通してサンプルを吸い取ることが可能になった。
最初のサンプルを収集するためにコードが使用されたミシガン大学の科学者ギデオン・ビリングス氏によると、このような自動化により、NASA は太陽系を超えた海の世界を探索できるようになるという。
「エウロパやエンケラドゥス(それぞれ木星と土星の衛星)のような場所にロボットを送り込むという壮大なビジョンがある場合、ロボットは最終的にはこのようにパイロットの助けなしで独立して動作する必要があるでしょう」と彼は述べた。
11 年 1 月 2020 日
オーストラリアフィールドロボット工学センター、マサチューセッツ工科大学、シカゴの豊田工業大学も参加する今後の研究には、以下のものが含まれる予定です。 トレーニング 「視線追跡」技術を使用し、科学者がパイロットを介さずにロボットに直接対処できる人間の言語インターフェイスを構築することで、海洋ロボットを ROV パイロットのように見えるようにします。
「最終的には、各車両が巣の中のミツバチのように協力して動作し、艦隊全体にわたる共有知性が存在する認知海洋ロボットのネットワークが実現できるでしょう」とカミリ氏は述べています。 「ジョイスティックを失うだけでは済まないでしょう。」
このプロジェクトは NASA と米国科学財団 National Robotics Initiative から資金提供を受けました。

